馬斯克又搞事情 用VR訓練機器人模仿人類動作
2017-05-19 18:45來源:威騰網編輯:毛青青

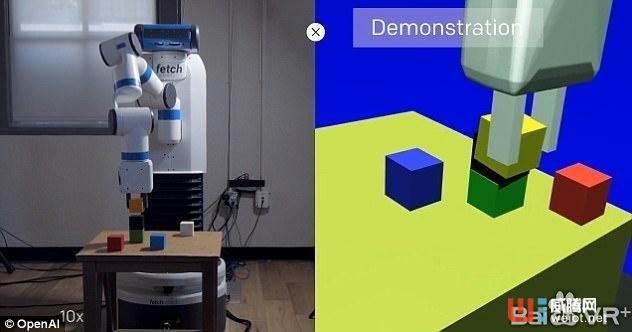
據該公司的開發者介紹:“我們已經研發了一款新算法——單次模仿學法算法。” 人們先在VR中完成一次操作,隨后機器人通過旁觀視頻來模仿人類的行為。為了證明該算法,設計者舉行了堆疊彩色方塊實驗。
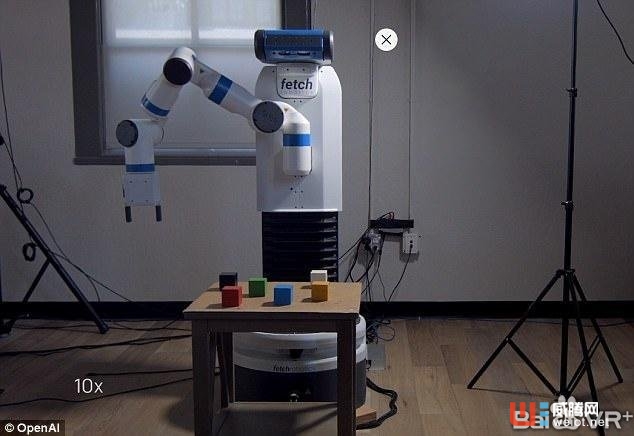
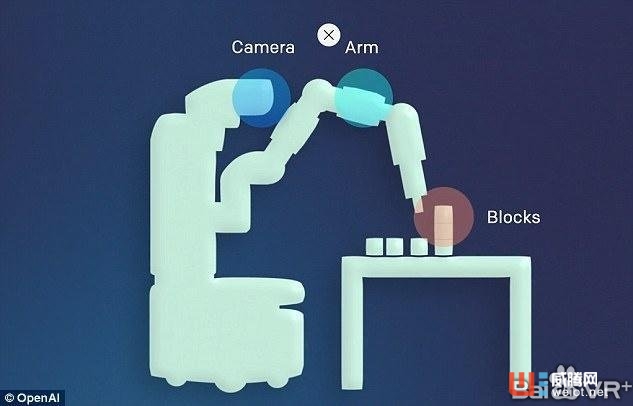
人類在VR環境中按程序移動方塊。機器人首先通過其攝像頭來感知環境,然后引導它的手臂以特定的方式來移動方塊。桌子上有6個顏色沒有同的方塊,雖然擺放位置沒有同,可是機器人最終都會以雷同的程序,堆疊成與人類操作雷同的樣子。
據研發團隊介紹,該機器人中含有兩個神經收集:視覺收集和模仿收集。視覺收集通過成千上萬弛模擬圖像舉行練習;模仿收集處理演示過程,分析動作背后的含義,并從另一個角度來完成義務。模仿收集從幾十個沒有同的義務中得到練習,而每個義務中又包含了上千次的演示。
該公司的手藝人員喬什托賓(Josh Tobin)說:“模仿可以讓人類快速進修新的行為,我們進展OpenAI研制的機器人也可以掌握這種方法。”該體系今朝只是一個初樣,未來開發者將繼續對此舉行研究。
?????投稿郵箱:jiujiukejiwang@163.com ??詳情訪問99科技網:http://www.hacbq.cn
相關推薦















 推薦資訊
推薦資訊